

Vektorske funkcije
- 4341
- 141
- Miguel Gutmann DVM
Kaj so vektorske funkcije?
A vektorska funkcija parametra t, Je funkcija, katere domena so resnične vrednosti t, Medtem ko pot tvorijo vektorji oblike r (t). Takšna funkcija je mogoče izraziti kot:
r (t) = f (t) Yo + g (t) J + H (t) k
Kje Yo, J in k So enotni vektorji v treh glavnih smereh prostora, funkcije F, G in H pa so resnične funkcije spremenljivke t. Zapis uporablja krepko, za razlikovanje vektorskih velikosti.
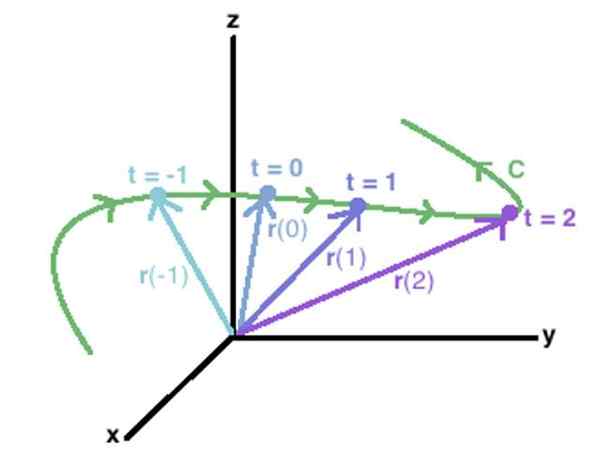 Vektorsko funkcijo v prostoru lahko uporabimo za opis krivulje C, pri čemer se pridruži skrajnim točkam vsakega od vektorjev, ki jih določa omenjena funkcija. Vir: Wikidot.
Vektorsko funkcijo v prostoru lahko uporabimo za opis krivulje C, pri čemer se pridruži skrajnim točkam vsakega od vektorjev, ki jih določa omenjena funkcija. Vir: Wikidot. Drug način označevanja vektorske funkcije je s kvadratnimi oklepaji:
r (t) =
Vektorske funkcije se lahko uporabijo za preučevanje krivulj v ravnini in prostoru, kot je usmeritev, ki sledi premikajočemu se predmetu. Primer je prispodoba, ki jo opisuje projicirana kroglica z začetno hitrostjo, pod gravitacijo.
Če želite v vsakem trenutku vedeti položaj žoge t, Vektorska funkcija z dvema komponentama, eno vodoravno in eno navpično:
r (t) = x (t) Yo + in (int) J
Oba x (t) kot y (t) So časovne funkcije t. Tako se pri pridružitvi skrajnim točkam vsakega od vektorjev r(t) Možno, oblikujte prispodobo, ki jo je opisala žoga v ravnini Xy.
Koncept se zlahka razširi na C krivuljo v prostoru, kot je tisti, prikazan na zgornji sliki. V njem se pojavljajo vektorji r (-1), r (0), r (1) r (2), katerih konci narišejo c krivuljo, narisano v zeleni.
Omejitve, izpeljane in integral vektorskih funkcij
Orodja za izračun, ki veljajo za resnične spremenljive funkcije, se lahko uporabijo tudi za vektorske funkcije.
Vam lahko služi: faktorizacijaMeja vektorske funkcije
Meja vektorske funkcije r (t) = f (t) Yo + g (t) J + H (t) k, Ko je t → a, je opredeljen kot:
=\left%20[%20\displaystyle%20\lim_%20t\to%20a%20f(t)\right%20]\textbfi+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20g(t)\right%20]\textbfj+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20h(t)\right%20]\textbfk)
Ob predpostavki, da obstajajo ustrezne meje F (t), G (t) in h (t), kdaj t → a.
Izhaja iz vektorske funkcije
Opredelitev izhaja iz vektorske funkcije r (t) = f (t) Yo + g (t) J + H (t) k Je analogen derivatu resnične funkcije resnične spremenljivke. Klicati r'(t) Če želite omeniti izpeljan, imate:
=\displaystyle%20\lim_\Delta%20t%20\to%200\frac\mathbfr(t+\Delta%20t)-\mathbfr(t)\Delta%20t)
Derivat obstaja, kadar obstaja prejšnja meja, in če je tako, funkcija r(t) je različna v t.
Integral vektorske funkcije
Biti r (t) = f (t) Yo + g (t) J + H (t) k vektorska funkcija, tako da so funkcije f, g in h integrirane v t.
Tako:
dt%20=\left%20[%20\int%20f(t)dt%20\right%20]\mathbfi+\left%20[%20\int%20g(t)dt%20\right%20]\mathbfj+\left%20[%20\int%20h(t)dt%20\right%20]\mathbfk+\mathbfC)
Z:
C = c1 Yo + c2 J
Kar pomeni, da je konstanta integracije tudi vektor, vendar konstantna.
Primeri vektorske funkcije
Primer 1
Imate vektorsko funkcijo r (t) = 3sec t Yo + 2Tan t J. Oceniti ga je mogoče za različne t vrednosti, na primer t = π/4 in t = π, kar povzroča vektorje r (π/4) in r (π):
r (π/4) = 3Sec (π/4) Yo + 2TAN (π/4) J = 3√2 Yo + 2 J
r (π) = 3Sec (π) Yo+2Tan (π) J = - 3 Yo
Vendar, r (t) Ne obstaja za vrednosti t = ∓π/2, ∓3π/2, ∓5π/2…, ker funkcija SEC t = 1 /cos t Ni definirano, ali je tako t = sen t / cos t.
Zato so domena funkcije R (t) vse resnične vrednosti T, razen vrednosti oblike:
∓ (2n+1) π/2; Z n = 0, 1, 2, .. .
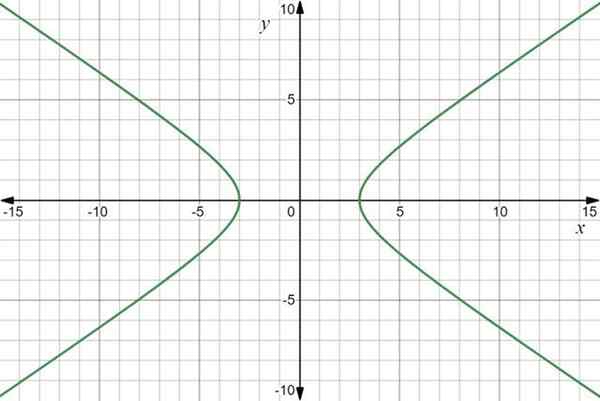
Graf funkcije je hiperbola:
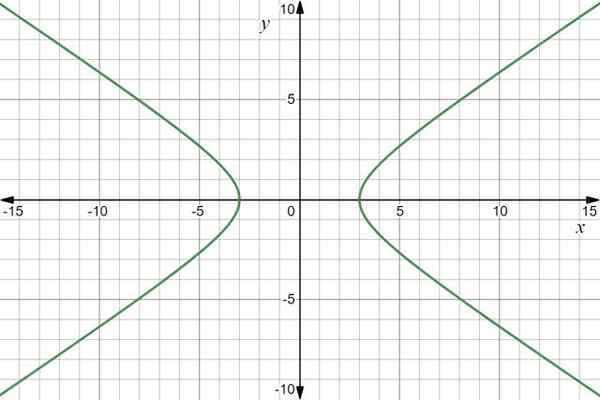 Graf vektorske funkcije r (t) = 3sec t Yo+2 porjavelo t J. Vir: f. Zapata skozi Desmos.
Graf vektorske funkcije r (t) = 3sec t Yo+2 porjavelo t J. Vir: f. Zapata skozi Desmos. Primer 2
Pri nagnjenem izstrelitvi je mobilni položaj vektorska funkcija r (t) = x (t) Yo + in (int) J . Ob predpostavki, da zračna odpornost ne posreduje in da je gravitacija edina sila, ki deluje na mobilnem telefonu, je vodoravno gibanje enakomerno rektno, medtem ko je navpična enakomerno pospešena, saj je g = 9.8 m/s2 Vrednost pospeška. Ta pospešek je navpičen proti tlem.
Vam lahko služi: pravila izpeljave (s primeri)V tem primeru funkcije x (t) in (t) Oni so:
- x (t) = xtudi + vvol∙ t
- in (t) = ytudi + vOy∙ T - ½ gt2
Zneske vvol in vOy So komponente vektorske funkcije, ki ves čas opisujejo mobilno hitrost:
v (t) = vx(t) Yo + vin(t) J
Z:
- vvol = vtudi∙ cos θ
- vOy = vtudi∙ Sen θ
Kot θ kot, ki tvori začetno hitrost glede na vodoravno.
Začetni položaj mobilnega dela je koordinatna točka (xtudi,intudi) ali enakovredno položaj, ki ga daje:
rtudi (t) = xtudi Yo + intudi J
Upoštevajte, da je bil v prikazanih enačbah navpični smeri dodeljen negativni znak, zato ga prevzame tretji izraz enačbe za y (t). Prav tako je mogoče dodeliti izvor začetnemu položaju mobilnega telefona.
Takojšnja hitrost izstrelka
Trenutna hitrost V (t) je prvi izhaja iz položaja, glede na čas. Izračuna se z uporabo znanih pravil izpeljave:
v(t) = R ' (t) = [x (t) Yo + in (int) J]'= x '(t) Yo + in '(t) J = vvol Yo + (vOy - Gt) J
Modul za hitrost je podan z:

Takojšen pospešek projektila
Znano je, da je g, v navpični smeri in smeri navzdol. To je preverjeno, če vemo, da je pospešek prvi izpeljan hitrosti glede na čas (ali drugi derivat položaja glede na čas, če je prednostno):
do(t) = V ' (t) = [Vvol Yo + (vOy - Gt) J] '= [Vvol Yo] '+ [(vOy - Gt) J] '= - g J
To je ravno pričakovani rezultat.
Vaja rešena
Glede na vektorsko funkcijo r (t) = 3T Yo + (T - 1) J, najti R '(t) in r "(T).
Rešitev
Z uporabo pravil o izpeljavi za vsako komponento imate:
Vam lahko služi: integracija konstanta: pomen, izračun in primeriR '(t) = = 3 Yo + J
In ker je derivat konstante 0:
r "(t) = 0
To pomeni, r "(t) je enak ničelnemu vektorju.
Reference
- Figueroa, d. 2005. Serija: Fizika za znanost in inženiring. Zvezek 1. Kinematika. Uredil Douglas Figueroa (USB).
- Larson, r. Izračun z analitično geometrijo. 2. mesto. Izdaja. McGraw Hill.
- Mathonline. Vektorske funkcije. Okrevano od: Mathonline.Wikidot.com.
- OpenTAX. Proračun, količina 3. Pridobljeno iz: OpenStax.org.
- Purcell, e. J. 2007. Izračun. Pearson Education.