

Antiderivacijske formule in enačbe, primeri, vaje

- 4990
- 1178
- Ms. Pablo Lebsack
A Antiderivacijsko F (x) funkcije F(x) se imenuje tudi primitiven ali preprosto nedoločen integral omenjene funkcije, če je v določenem intervalu Yo, Res je, da F '(x) = f (x)
Na primer, vzemimo naslednjo funkcijo:
f (x) = 4x3
Antiderivacija te funkcije je f (x) = x4, Ker z izpeljavo f (x) s pravilom izpeljave za pooblastila:

Dobimo natančno f (x) = 4x3.
Vendar je to le eden izmed številnih antiderivativov F (x), saj ta druga funkcija: g (x) = x4 + 2 To je tudi, ker z izpeljavo g (x) glede na x je enako, dobimo nazaj f (x).
Preverimo:
=4x^3)
Ne pozabite, da je tisti, ki izhaja iz konstante, 0. Torej na izraz x4 Lahko dodate katero koli konstanto in njegov izpeljan bo še naprej 4x3.
Sklenjeno, da je vsaka funkcija splošne oblike f (x) = x4 + C, kjer je C resnična konstanta, služi kot antiderivacija F (x).
Prejšnji ilustrativni primer je mogoče izraziti na naslednji način:
df (x) = 4x3 Dx
Nedefinirani antiderivacijski ali integral je izražen s simbolom ∫, torej:
F (x) = ∫4x3 dx = x4 + C
Kjer je funkcija f (x) = 4x3 Se imenuje integracija, in C je Konstanta integracije.
[TOC]
Primeri antiderivativov
Slika 1. Anti -hotley ni nič drugega kot nedoločen integral. Vir: Pixabay. Iskanje antiderivacije funkcije je v nekaterih primerih preprosto, v katerih so derivati dobro znani. Na primer, bodite funkcija f (x) = sen x, nerederivirana za to je druga funkcija f (x), tako da, ko jo dobimo f (x).
Ta funkcija je lahko:
F (x) = - cos x
Preverimo, da je res:
F '(x) = (- cos x)' =- (-sen x) = sin x
Zato lahko pišemo:
∫sen x dx = -cos x + c
Poleg poznavanja derivatov obstajajo osnovna in preprosta pravila integracije za iskanje nedoločenega antiderivacijskega ali integralnega dela.
Vam lahko služi: zaporedni derivatiBiti resnična konstanta, potem pa:
1.- ∫kdx = k ∫dx = kx + c
2.- ∫kf (x) dx = k ∫f (x) dx
Če lahko funkcijo H (x) izrazimo kot vsota ali odštevanje dveh funkcij, potem je njegov nedoločen integral:
3.- ∫H (x) dx = ∫ [f (x) ± g (x)] dx = ∫f (x) dx ± ∫g (x) dx
To je lastnost linearnosti.
The Pravilo moči Za integrale je mogoče določiti na ta način:

V primeru n = -1 se uporablja naslednje pravilo:
5.- ∫x -1 Dx = ln x +c
Enostavno je dokazati, da je derivat ln x Točno je x -1.
Diferencialne enačbe
Diferencialna enačba je tista, v kateri je neznano kot derivat.
Zdaj je iz prejšnje analize enostavno spoznati, da je obratno delovanje derivata nedefinirano antiderivativno ali integral.
Naj bo f (x) = y '(x), torej izhaja iz določene funkcije. Za označevanje tega izpeljave lahko uporabimo naslednji zapis:
=y'(x)=\fracdydx)
Takoj sledi, da:
dy = f (x) dx
Neznano o diferencialni enačbi je funkcija y (x), tista, katere derivat je f (x). Da bi ga razčistili, je prejšnji izraz integriran na obeh straneh, kar je enakovredno uporabi antiderivacij:
∫dy = ∫f (x) dx
Levi integral je razrešen s pravilom integracije 1 s k = 1 in s tem je iskana -awaite očiščena:
in (x) = ∫f (x) dx = f (x) + c
In ker je C resnična konstanta, če želite vedeti, katera je primerna v vsakem primeru, mora izjava vsebovati dovolj dodatnih informacij za izračun vrednosti C. To se imenuje Začetni pogoj.
Primeri vse to bomo videli v naslednjem razdelku.
Vam lahko služi: natančna ocenaAntiderivirane vaje
- Vaja 1
Uporabite pravila integracije, da pridobite naslednje nedefinirane antiderivative ali integrale danih funkcij in čim bolj poenostavite rezultate. Rezultat je priročno z izpeljavo.
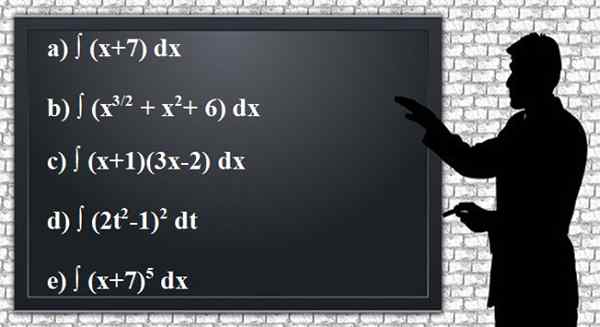 Slika 2. Definirane prednje ali integralne vaje. Vir: Pixabay.
Slika 2. Definirane prednje ali integralne vaje. Vir: Pixabay. Rešitev
Najprej uporabimo pravilo 3, saj je integracija vsota dveh izrazov:
∫ (x +7) dx = ∫ xdx +∫7dx
Za prvi integral se uporablja pravilo pooblastil:
∫ xdx = (x2 /2)+c1
V drugem integralnem pravilu 1 velja K = 7:
∫7dx = 7∫dx = 7x + c2
In zdaj so dodani rezultati. Obe konstanti sta združeni v eno, splošno imenovani C:
∫ (x+7) dx = (x2 /2) + 7x + c
Rešitev b
Z linearnostjo se ta integral razkroji v tri preprostejše integrale, za katere se bo uporabljalo pravilo pooblastil:
∫ (x3/2 + x2 + 6) dx = ∫x3/2 Dx + ∫x2 dx +∫6 dx =

Upoštevajte, da se za vsak integral pojavi konstanta integracije, vendar se srečajo v enem klicu C.
Rešitev c
V tem primeru je priročno uporabiti distribucijsko lastnost množenja za razvoj integracije. Nato uporabite pravilo pooblastil za iskanje vsakega integrala ločeno, kot v prejšnjem letu.
∫ (x+1) (3x-2) dx = ∫ (3x2-2x+3x-2) dx = ∫ (3x2 + X - 2) dx
Pozorni bralec bo opazil, da sta dva osrednja izraza podobna, zato sta se pred integracijo zmanjšala:
∫ (x+1) (3x-2) dx = ∫3x2 dx + ∫ x dx + ∫- 2 dx = x3 + (1/2) x2 - 2x + c
Rešitev e
Način za reševanje integrala bi bil razvoj moči, kot je bilo to storjeno v primeru D. Ker pa je eksponent višji, bi bilo treba spremeniti spremenljivo spremembo, da ne bi bilo treba tako dolgo.
Vam lahko služi: neprekinjena naključna spremenljivkaSpremenljiva sprememba je naslednja:
U = x + 7
Izpeljava na obeh straneh tega izraza:
du = dx
Integral se pretvori v enostavnejšo z novo spremenljivko, ki je razrešena s pravilom moči:
∫ (x+7)5 Dx = ∫ u5 du = (1/6) u6 + C
Končno se sprememba vrne, da se vrne v prvotno spremenljivko:
∫ (x+7)5 Dx = (1/6) (x+7)6 + C
- Vaja 2
Delec je sprva v mirovanju in se premika vzdolž osi x. Njegov pospešek za T> 0 je podan s funkcijo a (t) = cos t. Znano je, da je pri t = 0 položaj x = 3, vse v enotah mednarodnega sistema. Zahteva se, da najdete hitrost V (t) in položaj x (t) delca.
Rešitev
Ker je pospešek prvi izpeljan iz hitrosti glede na čas, imate naslednjo diferencialno enačbo:
a (t) = v '(t) = cos t
Sledi, da:
v (t) = ∫ cos t dt = sin t + c1
Po drugi strani pa vemo, da je hitrost izpeljana položaja, zato se spet integriramo:
x (t) = ∫ v (t) dt = ∫ (sin t + c1) dt = ∫sen t dt + ∫c1 dt = - cos t + c1 t + c2
Konstante integracije so določene iz informacij, navedenih v izjavi. Najprej pravi, da je bil delček sprva v mirovanju, torej V (0) = 0:
V (0) = sin 0 + c1 = 0
C1 = 0
Potem morate x (0) = 3:
x (0) = - cos 0 + c1 0 + c2 = - 1 + c2 = 3 → C2 = 3+1 = 4
Funkcije hitrosti in položaja so vsekakor takšne:
v (t) = sen t
x (t) = - cos t + 4
Reference
- Engler, a. 2019. Integralni računanje. Nacionalna univerza na obali.
- Larson, r. 2010. Izračun spremenljivke. 9na. Izdaja. McGraw Hill.
- Brezplačna besedila matematike. Antiderivativi. Okrevano od: matematika.LiibreTexts.org.
- Wikipedija. Antiderivacijsko. Pridobljeno iz: v.Wikipedija.org.
- Wikipedija. Nedočasna integracija. Okrevano od: je.Wikipedija.org.
- « 13 vrst vrednosti in njihov pomen (s primeri)
- Formula in enačbe električnega potenciala, izračun, primeri, vaje »